Subcapítulo 4.1
Maquinaria móvil autónoma
Esta sección analiza los aspectos de seguridad de los robots móviles industriales (IMR), como los AGV y AMR. Aprenderá cómo funcionan estos sistemas, dónde surgen los riesgos y qué medidas de protección, tanto integradas como adicionales, se recomiendan para garantizar una interacción segura entre las personas y los sistemas de automatización móvil.
Transporte flexible con AGV y AMR
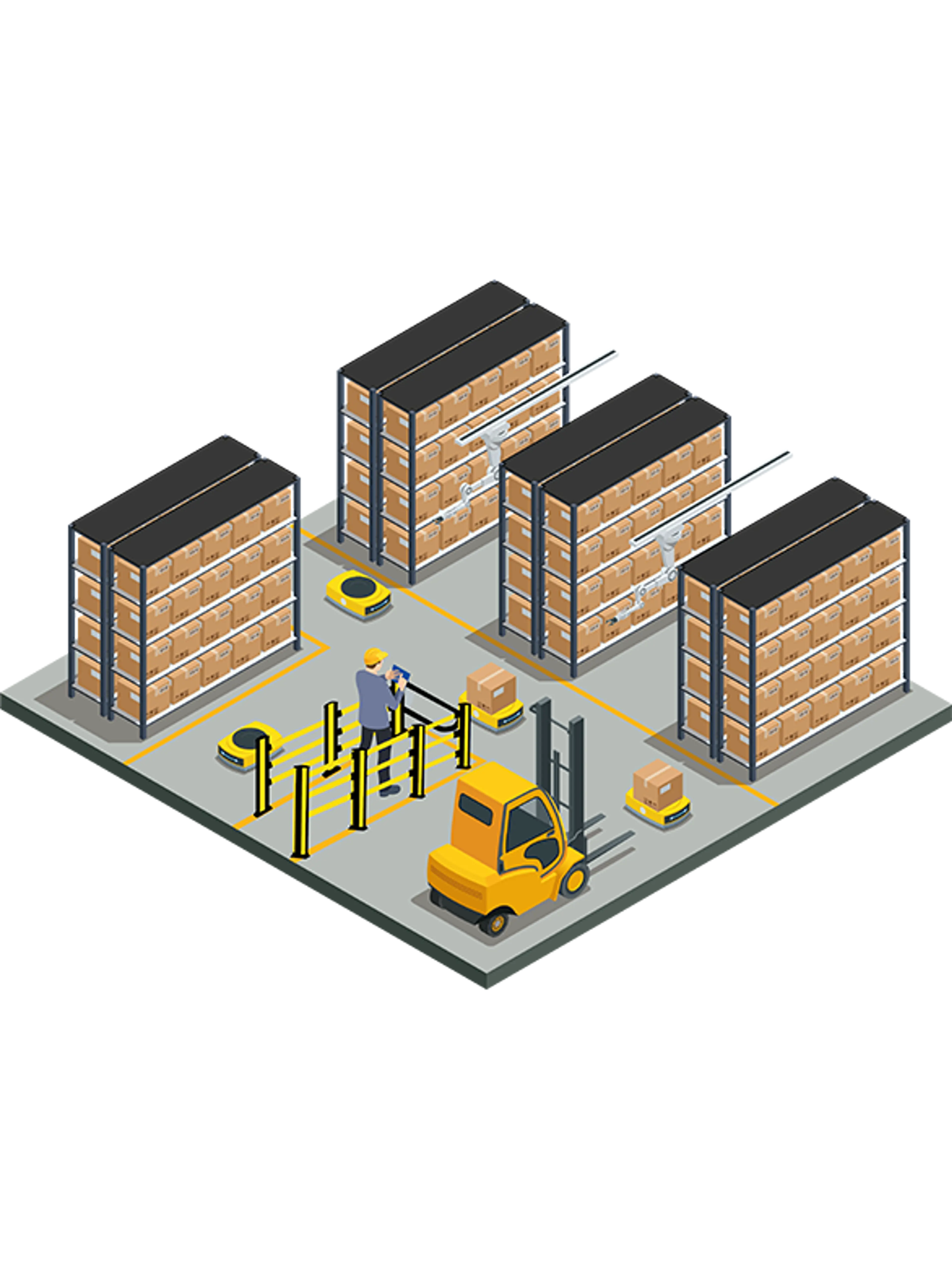
Los robots móviles industriales (IMR), como los vehículos de guiado automático (AGV) y los robots móviles autónomos (AMR), pueden transportar diversas unidades de almacenamiento hacia y desde las ubicaciones de almacenamiento.
Pueden levantar, transportar y mover palés, estanterías completas o incluso cargas unitarias muy grandes, aunque su uso más habitual es para cajas, contenedores y bandejas. Se emplean principalmente en estrategias “goods-to-person” para picking por unidad o por caja, pero también pueden realizar tareas de transporte intermedio dentro de un esquema “person-to-goods”.

Métodos típicos de manipulación de cargas de los IMR
Existen cinco formas principales en que los IMR recogen y colocan cargas (también se pueden usar combinaciones de estas):
-
AGV como montacargas no tripulado: mueve palés de manera autónoma.
-
Carga colocada sobre el vehículo: un robot, sistema lineal de manipulación o cinta transportadora coloca la carga sobre el vehículo (estos vehículos se denominan a menudo “undercarts” y pueden tener alturas muy bajas, de solo 50 a 300 mm).
-
IMR con cinta transportadora superior: para la transferencia de carga; algunos IMR pueden extender la cinta hacia una estantería para recuperar la carga, y pueden incorporar pinzas que faciliten el picking y la sujeción.
-
IMR que se desplaza bajo la carga: la levanta y la traslada; incluso se pueden mover estanterías completas hacia un puesto de preparación de pedidos y de vuelta al almacén (estos sistemas se conocen como ASRS – Automated Storage and Retrieval Systems).
-
Robot montado sobre un IMR: recoge los artículos, los coloca en una caja o plataforma, los transporta y luego los deposita en la ubicación de destino; estos IMR también pueden cumplir funciones de producción, como limpieza, pulido, inspección, etc.
Riesgos comunes en entornos con IMR
Aunque los IMR están equipados con avanzadas funciones de seguridad, persisten ciertos riesgos, especialmente cuando las personas se distraen o se acostumbran a su presencia.
En situaciones de emergencia, los robots móviles también pueden obstruir rutas de evacuación. La siguiente lista destaca los principales riesgos que deben considerarse cuidadosamente al planificar e implementar sistemas IMR:
-
Riesgo de colisión: impacto o atropello de personas, especialmente donde IMR y peatones comparten espacio o cuando los vehículos acceden a puestos de trabajo manuales.
-
Riesgo de paso por debajo (underride): los IMR de baja altura pueden pasar bajo equipos o vallados si los huecos del suelo son demasiado grandes.
-
Atrapamiento/cizallamiento con el entorno: en áreas estrechas como estanterías, pasillos reducidos, puertas, maquinaria o partes estructurales.
-
Riesgos en la manipulación de cargas: atrapamiento o cizallamiento durante el acoplamiento, carga o transferencia de materiales.

Funciones de seguridad y normas de los IMR
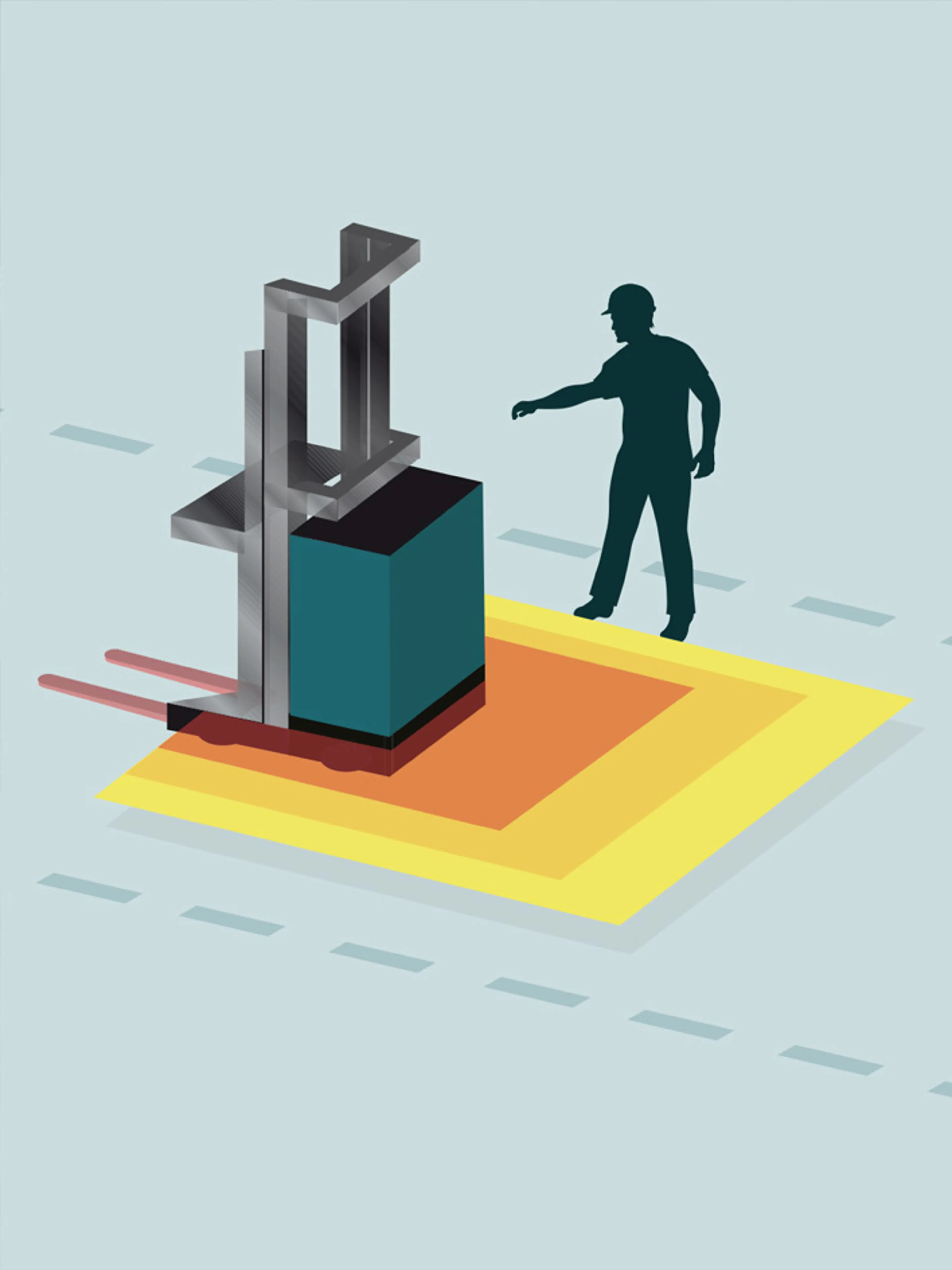
Todos los IMR cuentan con sensores de presencia que ayudan a prevenir accidentes.
Estos vehículos suelen desplazarse lentamente en áreas donde circulan personas y se detienen al encontrar obstáculos o personas en su trayectoria. La mayoría de los IMR pueden programarse para evitar zonas virtuales restringidas o de exclusión, y algunos incorporan parachoques que detienen el vehículo al producirse un impacto.
Entre las funciones de seguridad pasiva se incluyen botones de parada de emergencia, luces de advertencia y señales acústicas. Los requisitos de seguridad para AGV e IMR están recogidos en la norma (EN) ISO 3691-4, así como en ANSI/RIA R15.08-1 y ANSI/ITSDF 56-5 para Estados Unidos. Más información sobre estas normas se encuentra en el capítulo 5.3 Normas de seguridad Industrial .
Sobre esta base y respaldado por exhaustivas evaluaciones de riesgo, pueden ser necesarias las siguientes medidas para garantizar un entorno de trabajo seguro.